
Robots made of soft materials are inherenty safe for interaction with humans. In contrast with rigid robotic systems, soft robots are more robust and resilient against damage. They can often squeeze through confined spaces where rigid robots fail. Soft robots are typically designed with inspiration from biology, e.g. bacteria and octopus. Despite rapid progress in recent times, soft robots lag behind the functionalities and capabilities of natural organisms.
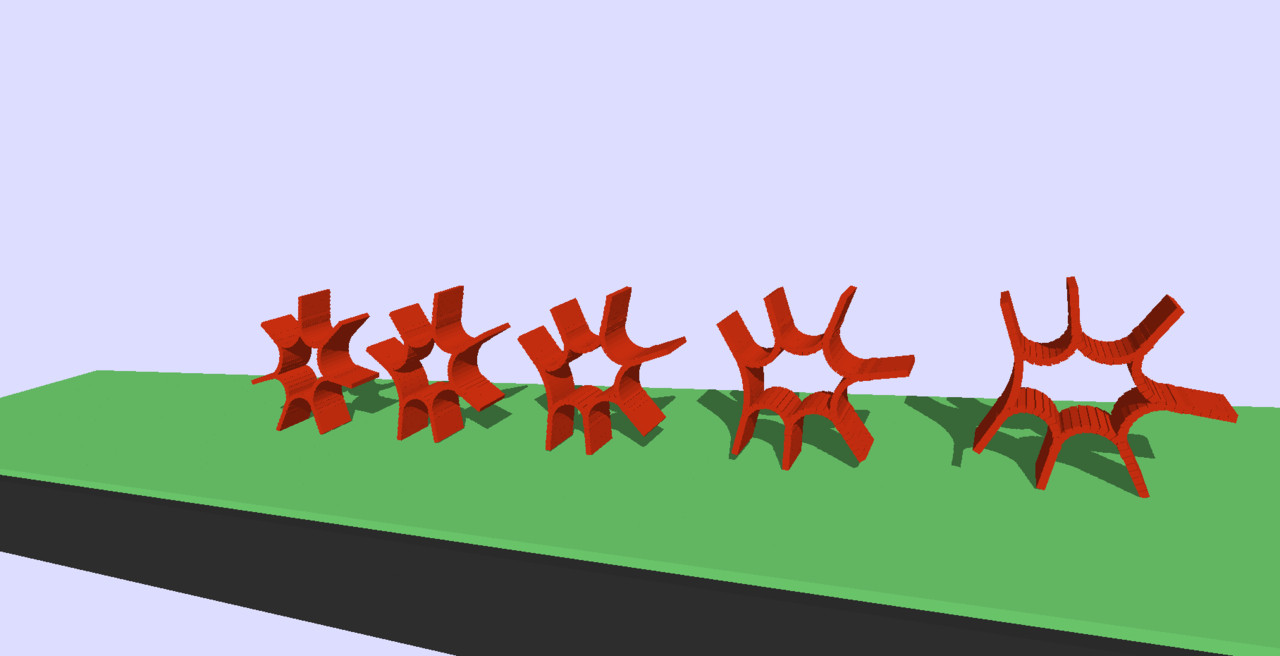
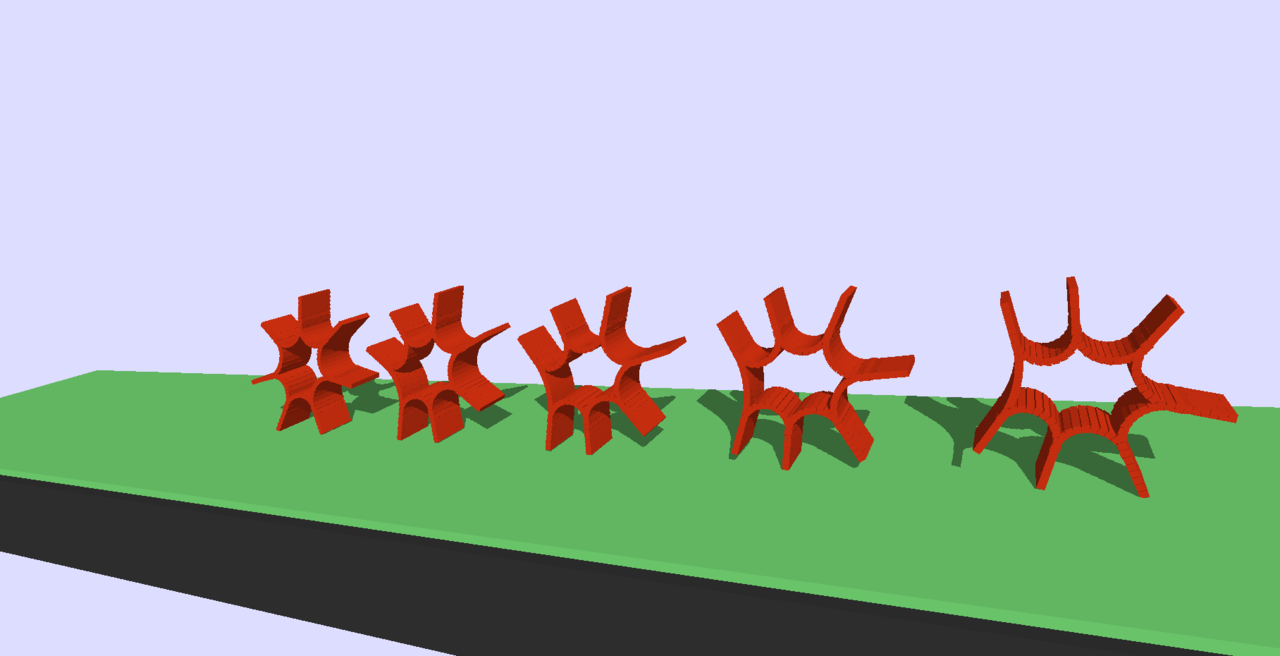
A bottleneck in design and fabrication of soft robots is the painstaking trial and error process requiring dozerns of iterations. This is where fast numerical simulations of soft robots can be useful. Our recent paper [1] introduces a computationally efficient simulation method for soft robots. Referring to Fig. 1, the robots studied in this paper undergo large deformation during locomotion. The effect of contact with ground and friction is also prominent. Due to relatively high speed of these robots, inertial effects are also non-negligible.

Our approach was motivated by recent developments in the comptuer graphics community on fast simulation algorithms for visually dramatic animation of hair, fur, and other filamentary structures. In particular, we employed a variation of the Discrete Elastic Rods (DER) algorithm [2]; DER has been used in several commercially successful movies, e.g. the Hobbit. While computer graphics community is more concerned about visual realism, we - mechanical engineers and roboticists - focus on the physical accuracy of the algorithms. A series of experiments were performed to quantitatively validate the simulation results. A video on the comparison between experiments and simulations can be found below.
On a personal note, this comparison is the most satisfying element of this work. When experiments can be reliably captured using simulations, we can envision real-world application of the simulation tool. A second element worth mentioning is the faster than real-time speed of the simulations, i.e. a computer can predict the motion of a robot faster than it happens in real world. This can eventually lead to simulation-based "closed loop" control, where these robots plan their own motion without human monitoring.
In the future, we hope to use these simulations to develop bio-inspired soft robots with unprecedented functionalities. For example, one of our recent works [3] show how buckling in bacterial flagella can be used to control its swimming direction.
- Huang, W., Huang, X., Majidi, C. and Jawed, M.K., 2020. Dynamic simulation of articulated soft robots. Nature Communications, 11(1), pp.1-9.
- Bergou, M., Wardetzky, M., Robinson, S., Audoly, B. and Grinspun, E., 2008. Discrete elastic rods. In ACM SIGGRAPH 2008 papers (pp. 1-12).
- Huang, W. and Jawed, M.K., 2020. Numerical exploration on buckling instability for directional control in flagellar propulsion. Soft Matter, 16, pp.604-613.



Please sign in or register for FREE
If you are a registered user on Research Communities by Springer Nature, please sign in